| |  |
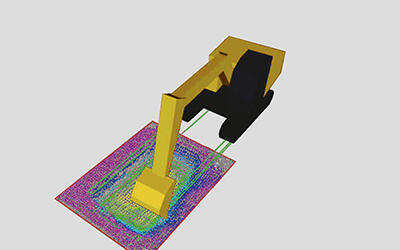
| 実証試験の様子 | | LiDARによる溝堀施工後の地形センシング結果 |
川崎重工は、「ショベル自律施工システム」(以下、本システム)を開発し、ショベルによる自律溝堀施工を実現しました。これにより、建設土木現場において技能者が担っているショベルによる溝堀施工の「自律化」が可能になります。
本システムは、ショベル搭載のコントローラによって、入力した3D設計データとLiDAR※1による地形センシング結果をもとに、効率的な掘削動作を計画し、自律的に掘削量を判断しながら掘削・ダンプ積込を行います。当社における実証試験において、幅2m・深さ0.6m・長さ10mの溝を自律施工できることを確認しました。加え、掘削作業のほか、溝の床面を水平に均す作業や押し固めを行う作業も自律的に行うことができることも確認しています。
現在、人口減少に伴う労働力不足が顕著化しており、建設土木業界においても技能者の育成や人材確保が大きな課題となっています。さらに、労働環境の改善および生産性向上が強く求められている中で、建設土木現場における作業の「自律化」のニーズはさらに高まっていくことが予想されます。本システムの実用化に向けて、様々な土質条件でも安定した掘削自律施工を行うことができるよう、引き続き、システム開発に取り組みます。
 本システムは、当社が長年培ってきた高度な油圧制御技術と産業用ロボットの制御技術を融合することで、当社独自のショベルの自律制御はもとより、高応答、高精度、高効率な動作を実現しました。建設土木業界に革新をもたらすソリューションとなることを目指し、当社の技術と挑戦で、さらなる開発を進めてまいります。
本システムは、当社が長年培ってきた高度な油圧制御技術と産業用ロボットの制御技術を融合することで、当社独自のショベルの自律制御はもとより、高応答、高精度、高効率な動作を実現しました。建設土木業界に革新をもたらすソリューションとなることを目指し、当社の技術と挑戦で、さらなる開発を進めてまいります。
<ショベル自律施工システムの特長>
![big]() | ・ | 簡易なポイント指示から連続した軌道を生成し、ロボットのように滑らかな軌道追従を行います。 |
![big]() | ・ | ショベル搭載のコントローラによって入力した3D設計データ、地形センシングによって得られたデータに基づき掘削動作を計画します。
|
| ・ | センシング技術や土質推定技術により、高効率でロバスト性の高い掘削を実現します。 |
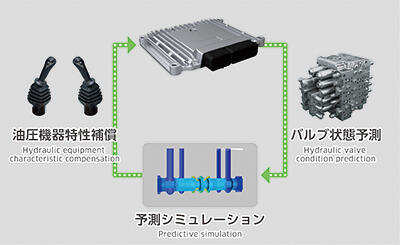
![big]() | ・ | 高度な油圧制御技術によって、精度良く、流量指令に追従し、高精度で滑らかな動作を実現します。 |
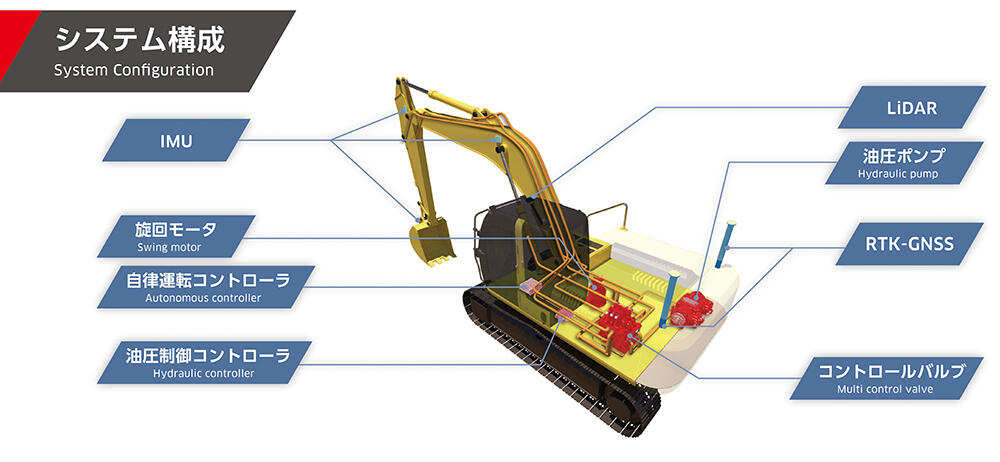
| ※1. | | LiDAR(Light Detection And Ranging):レーザー光を照射して、その反射光の情報をもとに対象物までの距離や形状を測定します。本システムではLiDARで地面の形状を計測しています。 |
| ※2. | | IMU(Inertial Measurement Unit):3次元の慣性運動(直行3軸方向の並進運動および回転運動)を検出する装置です。本システムではIMUをバケットなどに設置して姿勢を計測しています。 |
| ※3. | | RTK-GNSS(Real Time Kinematic-Global Navigation Satellite System):位置情報に加えて衛星信号の搬送波位相情報を使用することによりセンチメートルオーダーの測位ができます。本システムでは2個のRTK-GNSS受信機を使用し、ショベルの位置と方位を計測しています。 |
【参考リンク】
油圧ショベル向け油圧機器:
| | |
| 驗證試驗的情況 | | 激光雷達帶來的溝槽施工後的地形感測結果 |
川崎重工業開發了「挖掘機自主施工系統」(以下簡稱本系統),實現了挖掘機的自主溝槽施工。這使得在建築土木現場,技能人員負責的挖掘機溝槽施工的「自主化」成爲可能。
本系統通過搭載在人形機器人-電機控制器上的挖掘機,根據輸入的3D設計數據和激光雷達※1的地形感測結果,計劃高效的挖掘動作,自主判斷挖掘量,同時進行挖掘和傾倒裝載。在我們公司的驗證試驗中,確認能夠自主施工寬2m、深0.6m、長10m的溝槽。此外,還確認能夠自主進行溝槽底面的平整和加固作業。
目前,人口減少導致的勞動力短缺問題日益明顯,在建築土木行業,技能人員的培養和人才的保障成爲了重大課題。此外,在強烈要求改善勞動環境和提高生產率的背景下,建築土木現場作業的「自主化」需求預計將進一步增加。爲了實現本系統的實用化,繼續致力於系統開發,使其能夠在各種土質條件下穩定地進行挖掘自主施工。
 本系統通過融合公司多年積累的高端液壓控制技術和工業機器人控制技術,實現了公司獨特的挖掘機自主控制以及高響應、高精度、高效率的操作。我們旨在爲建築土木行業帶來創新解決方案,繼續在技術與挑戰中推進更進一步的開發。
本系統通過融合公司多年積累的高端液壓控制技術和工業機器人控制技術,實現了公司獨特的挖掘機自主控制以及高響應、高精度、高效率的操作。我們旨在爲建築土木行業帶來創新解決方案,繼續在技術與挑戰中推進更進一步的開發。
<挖掘機自主施工系統的特點>
![大]() | ・ | 通過簡單的積分指示生成連續的軌跡,實現像機器人一樣平滑的軌跡跟蹤。 |
![大]() | ・ | 根據挖掘機上人形機器人-電機控制器輸入的3D設計數據和地形感知獲得的數據,規劃挖掘動作。
|
| ・ | 通過傳感技術和土質推估技術,實現高效率和高魯棒性的挖掘。 |
![大]() | ・ | 通過先進的液壓控制技術,實現精確且跟隨流量指令,達到高精度和流暢的動作。 |
| ※1. | | 激光雷達(Light Detection And Ranging):通過激光光照射,根據反射光的信息測量對象的距離和形狀。本系統使用激光雷達測量地面的形狀。 |
| ※2. | | IMU(慣性測量單元):是一種檢測三維慣性運動(垂直的3軸方向的平移運動和旋轉運動)的裝置。本系統將IMU安裝在剷鬥等部件上以測量姿態。 |
| ※3. | | RTK-GNSS(實時動態全球導航衛星系統):通過使用位置信息和衛星信號的載波相位信息,可以實現厘米級的定位。本系統使用兩個RTK-GNSS接收機來測量挖掘機的位置和方位。 |
【參考鏈接】
油壓挖掘機專用油壓設備: