
 而小马智行的招股书,实际上也对自动驾驶技术做了一次完整又详实的科普。
而小马智行的招股书,实际上也对自动驾驶技术做了一次完整又详实的科普。自動駕駛行業被引爆的同時,樓教主的好消息將近。
在納斯達克完成遞交招股書後,小馬智行敲鐘進入倒計時。
一支天才雲集的隊伍,創業8年,在自動駕駛領域打造出一家明星獨角獸,靠的還是紮實的業務能力和領先的技術。
 而小馬智行的招股書,實際上也對自動駕駛技術做了一次完整又詳實的科普。
而小馬智行的招股書,實際上也對自動駕駛技術做了一次完整又詳實的科普。
根據招股書,小馬智行的自動駕駛系統,可以拆解爲幾部分,下面來逐一了解。
傳感器
自動駕駛汽車,想像人類司機一樣行駛,就需要像人類司機一樣,清楚地感知到路況,這就涉及到傳感器:
激光雷達
激光雷達,顧名思義,是使用激光束探測汽車周圍的物體,在各種光照條件下,可以實現高分辨的距離感應。
多個位置部署激光雷達,可以在各種環境和光照條件下,觀測到汽車、行人、交通信號燈等等,實時生成周圍環境的三維圖像。
攝像頭
多個高精度的攝像頭,可以讓車輛更全面、全方位地觀察周圍環境,沒有重大盲點,能從中分辨、識別出障礙物,也能讓交通狀況的圖景範圍也更廣泛。
雷達
雷達是通過發射無線電波的方式,實現車輛的距離與速度探測,在雨、雪、霧等惡劣天氣時,相比起激光雷達和攝像頭,毫米級雷達表現更出色。
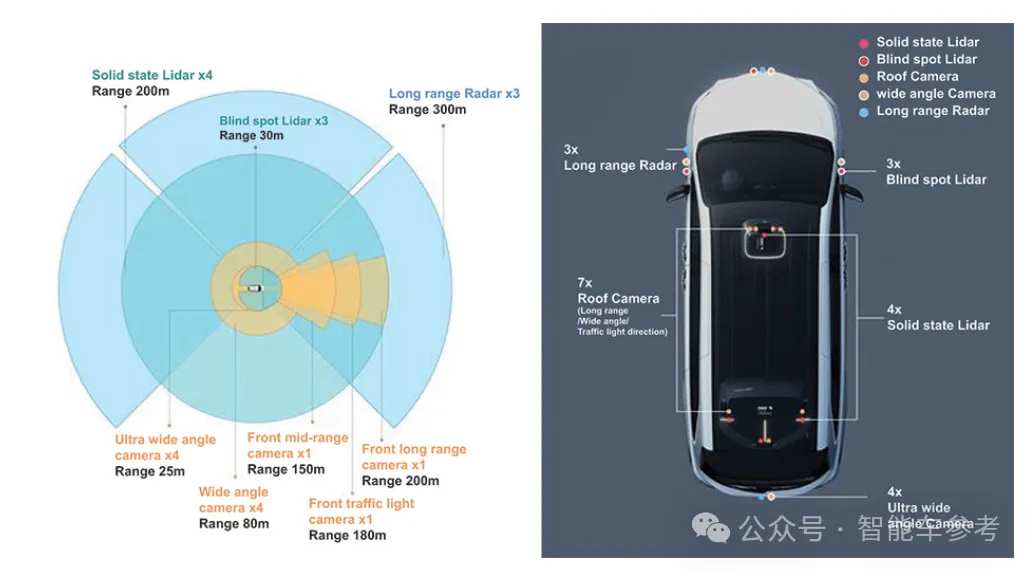
小馬最新第六代自動駕駛汽車模型中,採用的就是以上三種結合的多傳感器方法,配備了7 個激光雷達、11 個高分辨率攝像頭和 3 個遠程雷達,三種傳感器優劣勢互補,可以更有效觀測到環境。
但傳感器組件中,有單一傳感器出現故障該怎麼辦?
在這個時候,除了感知環境,汽車的準確定位也是重要數據,所以小馬還採用了GNSS 天線模組、IMU慣性測量單元等設備。
GNSS / IMU
高精度全球導航衛星系統 (GNSS) ,和慣性測量單元 (IMU),是和高清地圖和定位模塊協同工作的,可以確定汽車的準確定位。
端到端技術的軟件堆棧
在招股書中,小馬智行特別強調了自己的自動駕駛技術棧整體可以看成一個「大腦」,通過一整套軟件模塊和算法來控制車輛,這個大腦或者說AI司機,本身不受車輛平台種類限制,集成各種傳感器類型和算法模塊。
小馬還着重強調端到端的可解釋性,所以採用分段式模式,仍然包含感知、預測、規控、模擬等等模塊,下面來一一詳解:
端到端驅動閉環演進
首先來看小馬的端到端模型,通過融合可學習度量空間,模擬車輛在真實世界的行爲,並且通過智能標記和特徵提煉技術,把LLM的知識庫遷移到端到端模型中,擴充原本有限的資源,方便系統處理複雜的駕駛條件。
而沒做標記的數據,會通過自監督解釋模型,繼續訓練世界模型和端到端模型,解釋端到端的推理結果,包括感知結果、預測結果、做出的具體決策和詳細的場景描述等等。
這種全面的可解釋性,可以更深入地了解自主系統的功能和決策過程。
在這個過程中,爲了保障適應性和準確性,小馬智行加入了可學習優化模型,集成基於模型方法和優化方法,既具備數據驅動的特性,也保留了可控性。

另外,想要真正實現L4級的系統,只有當前和過去的數據預測未來是不夠的,真正的挑戰,還是在於如何與現實世界的頻率相匹配,模擬長尾場景和行爲,以實現開發的不斷迭代。
因此,需要創建一個高保真的環境,方便模擬現實場景。這就是小馬的閉環模擬引擎,PonyWorld。
PonyWorld在視覺細節和動態響應方面,精確複製了真實世界條件,這可以讓系統突破功能的界限,模擬關鍵場景,比如突然出現的孩子、未蓋的沙井,或前方車輛掉落的碎片等等。
這個系統會使用過去事件的記錄和既定的未來事實,對各種未來場景進行合理的推斷。
當自動駕駛汽車的未來行動與這些記錄一致時,真值條件生成模型會如實反映記錄中的未來;相反,當未來行動偏離記錄時,模型會重建與記錄不同的關鍵行爲特徵,以便保持可信度。
感知與預測
車輛自動駕駛的過程,需要「虛擬駕駛員」能夠「看到」汽車周邊的環境,並且及時做出反應,這就需要具備感知和預測能力。
小馬智行的感知和預測模塊,採用的都是多模態、多任務和快速調整的大型Transformer框架。
在感知方面,採用的是快速學習技術,集成點雲、圖像和電磁響應等各種模態的輸入,可以基於單一模型,準確檢測各種不同類型的物體,並且大幅降低延遲。
通過處理傳感器組件收集的數據,感知模塊自動完成物體的分割、檢測、分類、跟蹤,以及場景的理解。
出現極端、惡劣天氣,肉眼難以看清時,這種能力讓自動駕駛車輛在行駛過程中,依然能無障礙感知環境,因此會比人類駕駛員表現得更好。

爲了進一步提升感知模塊的性能,感知模塊中加入了深度學習技術處理數據,並且利用啓發式方法,也就是人類知識和常識,在決策層添加確定性數學公式和規則,以此彌補深度學習技術中,模擬與現實之間的差距。
在預測方面,預測模塊採用多模態深度學習模型,融合了感知觀察和人類常識的信息。
這些常識,是從交通規則和人爲設計的提示中提取,以知識圖譜的形式表示,而Transformer結構,會捕獲不同模態之間的相關性。
根據一系列數據,預測模塊會給出判斷。這些數據同樣圍繞傳感器數據展開,又結合了感知模塊的輸出數據,以及類似道路代理的歷史決策經驗。

考慮到可能出現意外情況,在記錄常規數據以外,數據集還針對每種情況,給預測模塊添加了額外的可學習和針對性提示。
預測模塊和感知模塊類似,也採用了深度學習和啓發式方法,爲每個觀測到的道路代理提供一條預測軌跡,並且會計算出發生的概率,爲其他模塊的工作提供參考。
規劃與控制
成功感知並預測數據之後,就要根據輸入的數據,進行規劃和執行操作了。
關於規劃和控制模塊,小馬是靠AI來創建的,這裏面涉及到博弈論的方法。
在模擬和分析 車輛與其他道路主體間的相互作用時,舉個例子,如果自動駕駛汽車和有人駕駛汽車同時接近十字路口,博弈論會幫助自動駕駛車輛,選擇最佳路線、平穩加減速,或者適當變道,確定一個最佳的行動決策,很適用於高峰時段、擁堵道路的場景。

同時,爲了讓駕駛行爲和人類更接近,決策器中使用了強化學習人類反饋 (RLHF) 的調整機制。
利用人類貼標員,獲取在各種情況下,有關自動駕駛系統的安全性、舒適性和效率的反饋,這些反饋會用於訓練獎勵函數,讓這個函數在更大的數據集上調整深度學習決策。
硬件以及整車集成
了解完軟件,接下來就是自動駕駛的汽車硬件,以及如何把每一部分整合在一起了。
計算系統
從傳感器收集到的數據,是由計算系統處理,通過算法實時運行來實現自動駕駛的。而車載計算單元,就負責處理傳感器收集的數據。
小馬智行的自動駕駛計算單元(ADCU),運用的是異構計算架構,包括中央處理單元(CPU)、圖像處理單元(GPU),現場可編程門陣列(FPGA)和微控制器單元(MCU),是一個完全汽車級的計算平台,可以方便定義完全適配自動駕駛應用的計算架構。
利用ADCU計算平台,小馬可以通過微調,保持性能和資源的消耗平衡。如果出現新技術,ADCU也可以更輕鬆地進行調整和升級,具備很強的靈活性和可擴展性。

車輛集成
自動駕駛的最後一環,就是把每一部分系統,集成到車輛中。
小馬智行的解決方案,是建立在汽車級硬件和軟件工具鏈的基礎之上,並加入了監管系統。
在自動駕駛軟件堆棧和車輛平台之間,通過可靠的接口,實現車輛平台準確地接收並執行控制命令。
各個模塊當中,車載系統提供了統一的應用程序交互接口(API),以便數據在整條傳輸路徑上,能夠保持穩定和順暢。同時,車載監控系統,也能及時發現各模塊中可能出現的故障。

還有最重要,也是最後的一重保障,就是安全冗餘。
在小馬的汽車模型中,冗餘平台是通過冗餘傳感器、計算系統、電源以及執行器來保障安全的,這樣可以避免出現單點故障的情況。
舉個例子,在計算系統中,不同的處理器,會相互交叉檢查,並充當彼此的備份系統,如果發生錯誤,GPU上運行的某些算法就會回退到CPU。
再舉個例子,如果主電源系統發生故障,備用電源系統將無縫接合,確保計算系統的持續供電,保障車輛正常運行。

這個過程中,冗餘有三層:正常運行模式、降級安全模式、最小風險條件模式。
降級模式和最小風險條件模式,是在物理上獨立的冗餘平台上運行,其中包括冗餘傳感器和計算。
如果在正常運行期間發生故障,平台就會檢測到這些故障,並將系統轉換爲降級安全模式,讓車輛行駛到安全位置。
如果發生降級安全模式也無法解決的嚴重故障,就會觸發最小風險條件模式,讓車輛至少可以在車道上停車,不會發生碰撞。
最後,作爲這一切的載體——自動駕駛汽車,小馬的選擇是與主機廠合作,共同設計、測試汽車,並且一起建立集成的精簡裝配線。

目前小馬智行推出的自動駕駛車輛,是和豐田合作開發的,更新到了第六代,2023年7月就開始部署面向公衆的機器人出租車服務。
最新的進展是,第七代自動駕駛軟硬件系統,已經進入了研發驗證階段,就在11月2日,小馬智行和北汽新能源簽約,第七代系統將搭載極狐阿爾法T5,2025年就會完成並推出首批極狐阿爾法T5的Robotaxi車型。
如今,自動駕駛行業玩家都在競速,商業化落地,誰會是第一個呢?
